サイボーグの概念が提唱されてから半世紀、今日、ウェアラブル技術やロボット工学・制御技術を駆使したデジタルサイボーグ「自在化身体」の研究・開発が着目されています。自在化技術の特徴として非侵襲的(外科手術などを必要としない)身体変工・編集、自在・可変性があります。
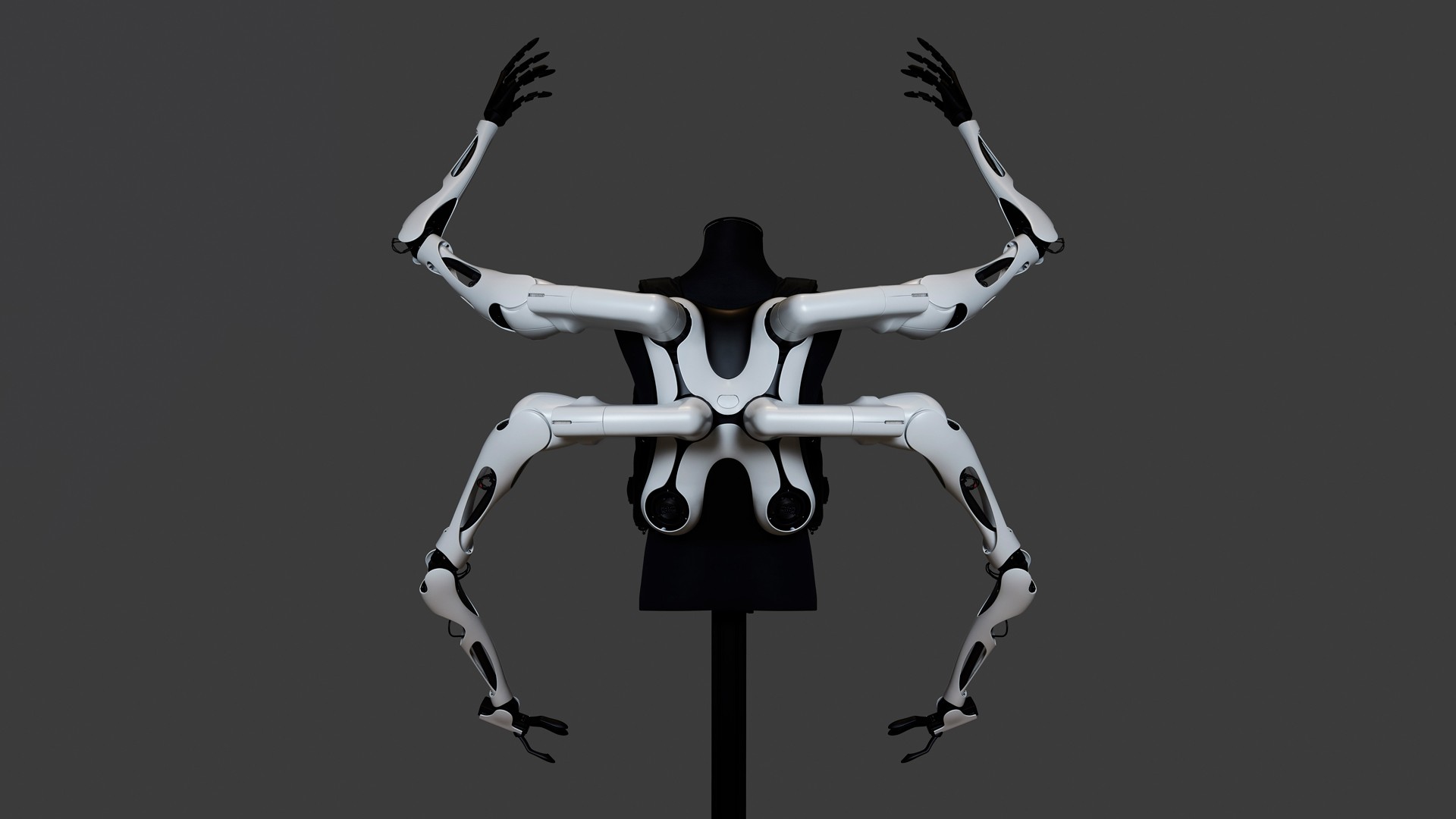
複数の自在化身体間のインタラクションを探るためにデザインされた「自在肢」は、6つのターミナルを持つベースユニットと、装着者が制御可能な着脱式ロボットアームからなるウェアラブルシステムです。自由自在に身体をデザインできる自在化身体の実現例であるのみならず、複数の装着者間での腕の「贈与」「交換」などの社会的インタラクションを可能とする実験的作品です。
This work is granted by JST ERATO Inami JIZAI BODY Project.




Credit
Mitsuru Muramatsu
Yusuke Kamiyama
Nahoko Yamamura
Shin Sakamoto
Daisuke Uriu
Masahiko Inami
Shunji Yamanaka
Photo: Shintaro Ono
Client:
Category:
Robotics
Date:
January 1, 2022
Related Projects