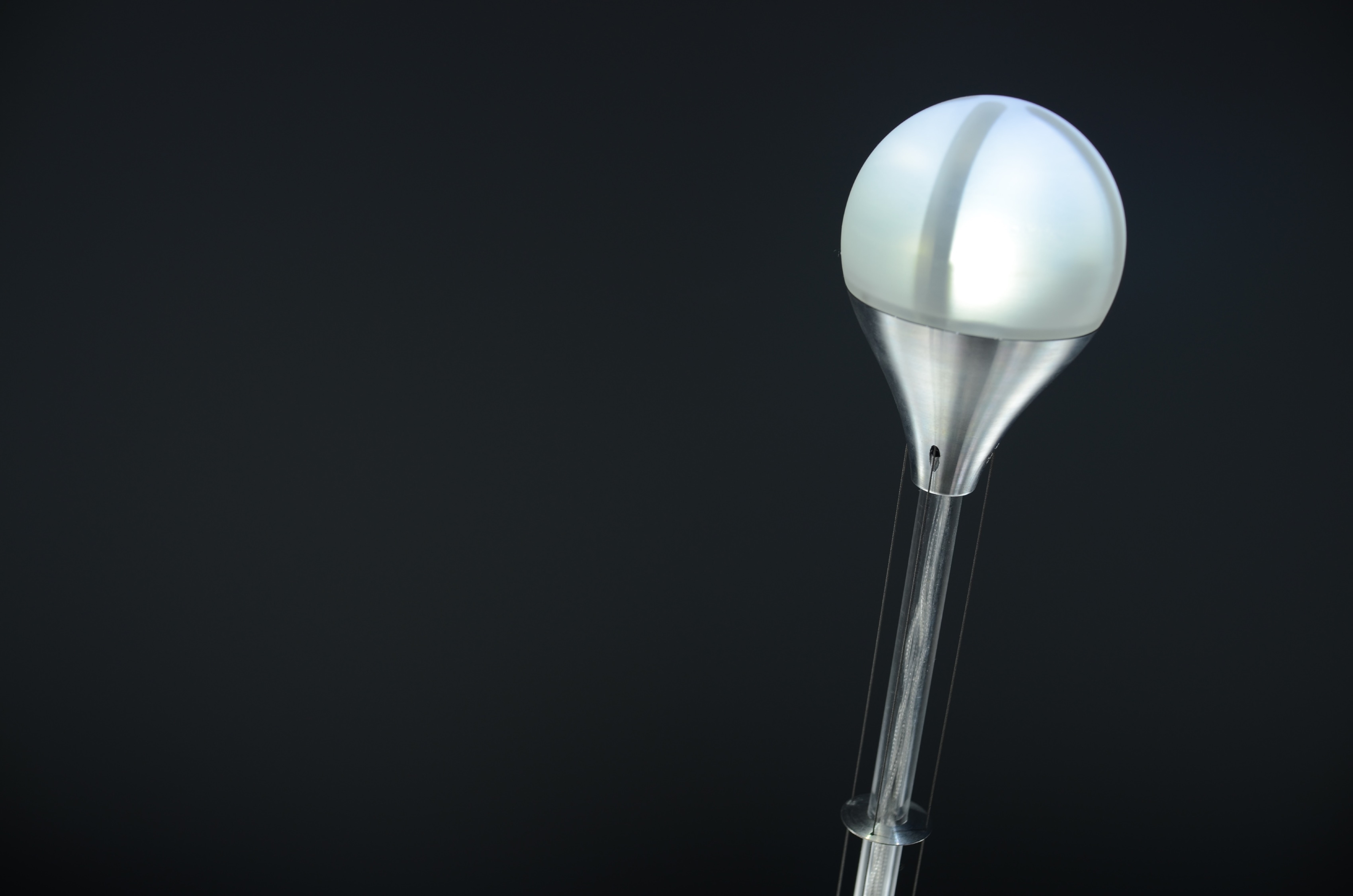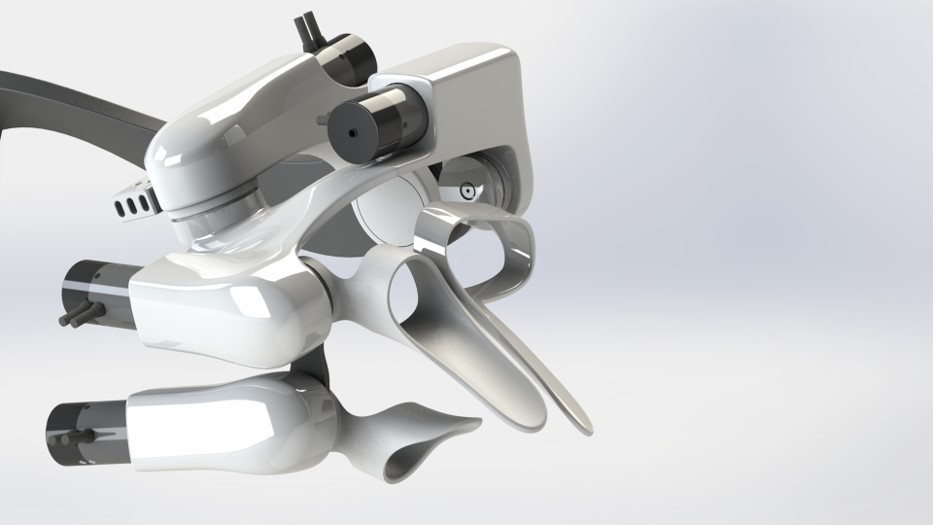
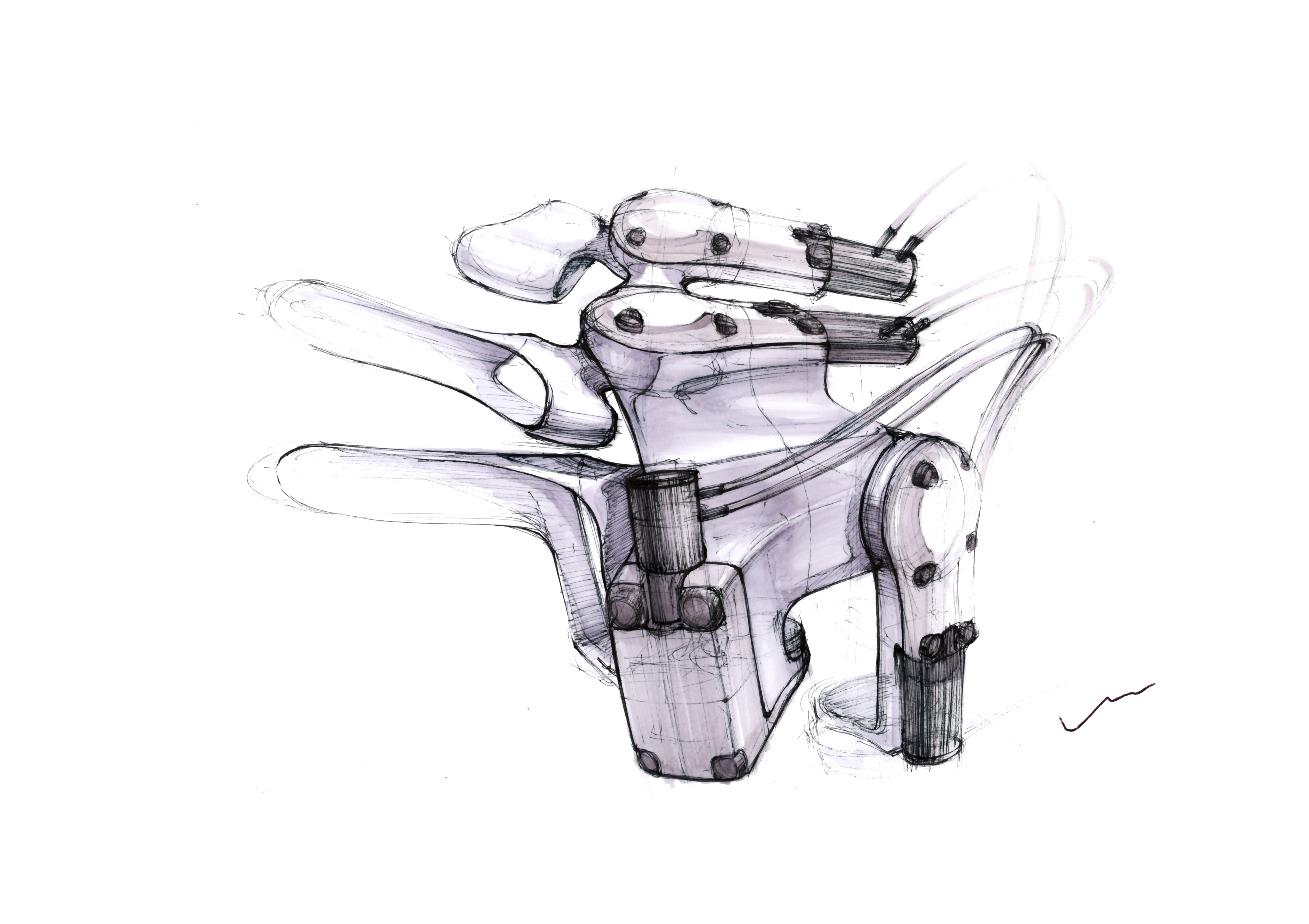
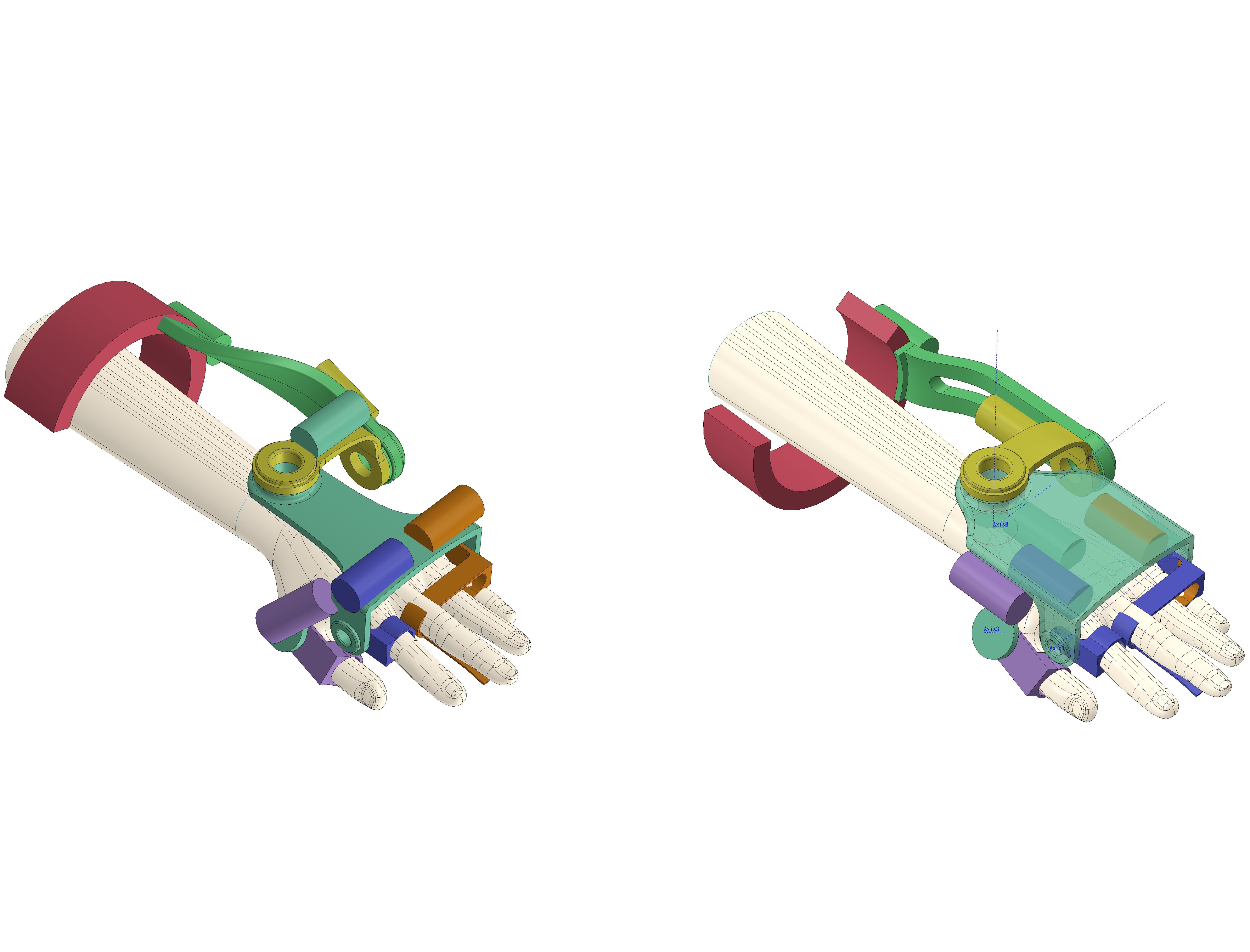
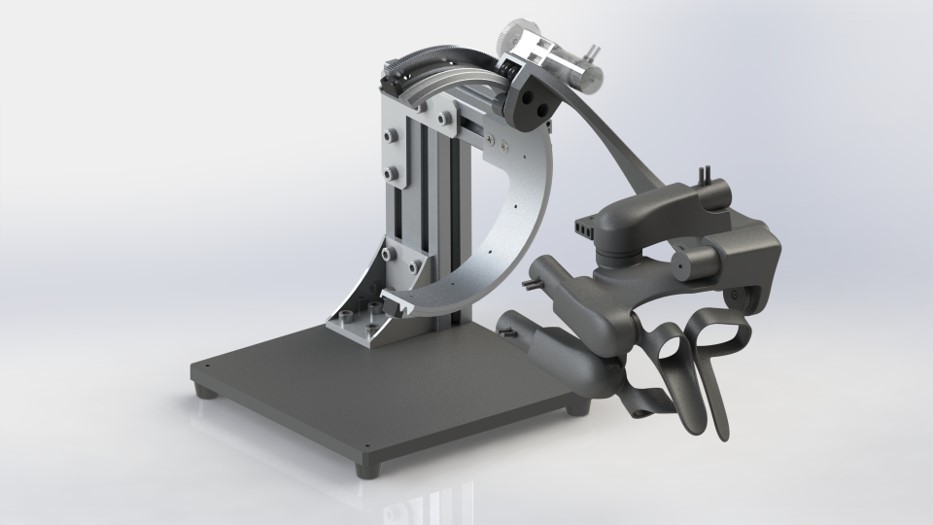
ロボットハンド用マニピュレータのデザインプロジェクト。
人の手に沿い使いやすい形状を模索するため、モーターのレイアウトを始め各構造体のジオメトリ検討からデザインをスタートさせました。通常エステティックデザインでは、既にある構造に対してカバーを施すというイメージが強いですが、その流れを実施すると不要な空間が生まれやすく、また使いやすさへのアプローチをするにあたって早々に限界点が訪れることが多くあります。工学的観点のみを研ぎ澄ました結果生まれる構造体が必ずしも使いやすさや美しさにとって最適な設計とは限らないためです。工学的な設計意図を最大限に汲み取り、さらに他の要素を高度に融合させることこそが良いデザインに対する最も重要なアプローチの一つであると考えます。設計した構造を実際に造形し手に装着し操作性を確かめる、そこから得た知見を設計に反映させる。素早くそのサイクルを回していくことで本マニピュレータは作られました。


Credit
Yusuke Kamiyama
Client:
Category:
Robotics
Date:
January 1, 2018
Related Projects